Động cơ DC đảo chiều là một trong những công nghệ đơn giản nhưng quan trọng trong ngành điện. Trong bài viết này, chúng ta sẽ tìm hiểu về 4 mạch đảo chiều động cơ DC, cùng điểm qua ưu và nhược điểm của từng mạch.
- Ổ cắm điện ở Nhật Bản Là Loại Gì ?, Điện Áp Ở Nhật Bản Bao Nhiêu Vôn ?
- Chương Trình Free Ship: Tri Ân Quý Khách
- Biến trở: Thông tin về công dụng và ứng dụng trong công nghiệp và đời sống hàng ngày
- Sự khác biệt chính giữa đoạn mạch nối tiếp và mạch song song
- Cảm biến kim loại tiệm cận OMDHON SN04-N Inductive Proximity Sensor – Chất lượng và độ bền hàng đầu
Contents
1. Mạch đảo chiều quay động cơ DC dùng 2 relay
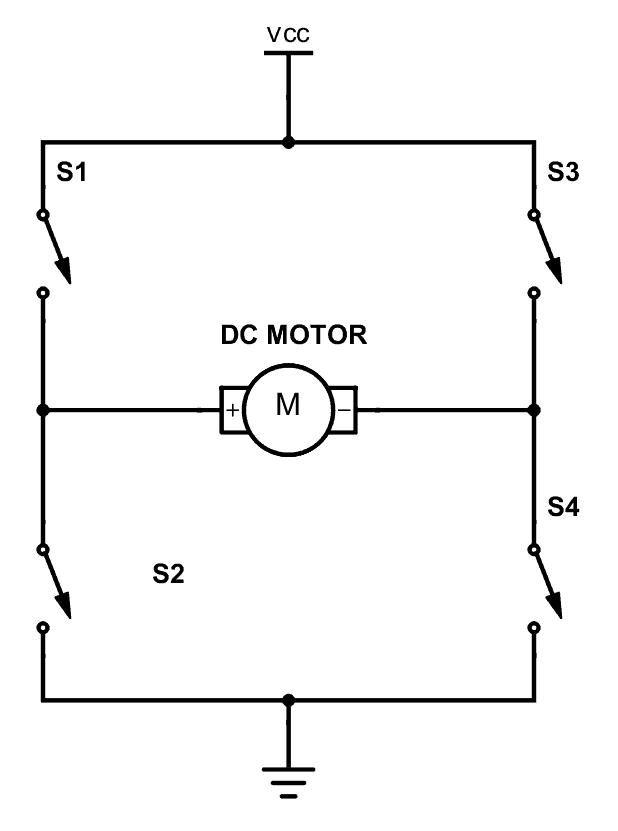
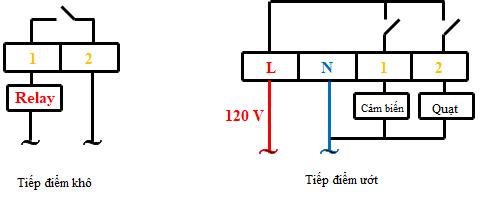
Mạch đảo chiều quay động cơ DC sử dụng 2 relay tiếp điểm đóng mở được thiết kế như hình bên dưới. Mạch này sử dụng 2 nút nhấn để điều khiển việc đóng mở 2 relay, mỗi relay tương ứng với một chiều quay của động cơ. Nhờ đó, ta có thể đảo chiều quay của động cơ DC.
Bạn đang xem: 4 Mạch đảo chiều động cơ DC – Ưu và nhược điểm từng mạch

Sơ đồ mạch đảo chiều động cơ DC dùng 2 relay
Nguyên lý mạch điện:
- Ở trạng thái bình thường, động cơ 2 đầu dây động cơ được nối với nhau và nối với nguồn 12V. Điện áp 2 đầu dây động cơ bằng 0, do đó động cơ không hoạt động.
- Khi nhấn nút “THUẬN”, cuộn dây relay 1 được cấp điện, vì vậy relay 1 đóng. Tiếp điểm relay tác động nối chân C với chân NO. Khi đó, động cơ được cấp điện áp 12V, dòng điện đi từ phải qua trái động cơ. Do đó, động cơ sẽ hoạt động và giả sử chiều quay của động cơ là chiều thuận.
- Khi nhấn nút “NGHỊCH”, cuộn dây relay 2 được cấp điện, do đó tiếp điểm thường hở của relay chuyển sang thường đóng. Khi đó, động cơ được cấp điện và dòng điện có hướng từ trái qua phải động cơ. Động cơ hoạt động và quay theo chiều ngược lại.
Xem thêm : TRIAC: Khái niệm, phân loại và ứng dụng
Ưu và nhược điểm:
- Ưu điểm: Mạch đơn giản, dễ đấu dây vì sử dụng ít linh kiện. Công suất của relay lớn từ 10A – 25A nên phù hợp với nhiều loại động cơ một chiều.
- Nhược điểm: Do relay sử dụng tiếp điểm cơ khí nên tốc độ đóng cắt của mạch thấp.
2. Mạch đảo chiều quay động cơ DC dùng cầu transistor
Sơ đồ mạch cầu H điều khiển đảo chiều quay động cơ DC sử dụng transistor như hình bên dưới. Mạch này sử dụng 2 transistor NPN công suất TIP41 phía trên cầu H và 2 transistor PNP TIP42 bên dưới cầu H. Dùng transistor BC547 làm mạch lái để kích 4 transistor công suất.

Sơ đồ mạch đảo chiều động cơ DC dùng cầu transistor
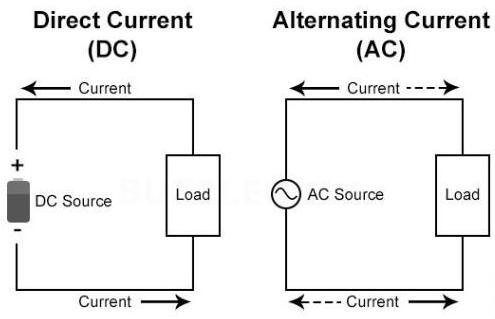
Xem thêm : Phân biệt điện 1 chiều và điện xoay chiều
Nguyên lý hoạt động:
- Mỗi bên của cầu H sử dụng transistor NPN nối tiếp PNP và chung cực B, nên khi transistor này dẫn thì transistor kia không dẫn. Điều này giúp việc điều khiển dễ dàng và tránh ngắn mạch khi cả 2 transistor cùng dẫn.
- Ở trạng thái bình thường, transistor BC547 Q5, Q6 không dẫn. Nên các transistor TIP42 Q3, Q4 không dẫn, kéo theo transistor Q1, Q2 không dẫn. Do đó, động cơ không được cấp điện nên không hoạt động.
- Khi nhấn nút “THUẬN”, transistor Q5 BC547 được kích dẫn, kéo cực B của transistor Q1 và Q3 xuống 0V nên Q3 dẫn, Q1 không dẫn. Q3 dẫn nên ngay lập tức transistor Q2 được phân cực qua điện trở R3. Lúc này, động cơ hoạt động quay theo chiều thuận, dòng điện qua Q2, động cơ và Q3.
- Khi nhấn nút “NGHỊCH”, transistor Q6 dẫn. Nguyên lý tương tự, Q4, Q1 dẫn nên động cơ quay theo chiều ngược lại.
- Các diode D1, D2, D3, D4 mắc song song với transistor với nhiệm vụ triệt tiêu dòng điện phát ngược lại khi ngưng cấp điện cho động cơ.
Xem thêm : TRIAC: Khái niệm, phân loại và ứng dụng
Ưu và nhược điểm:
- Ưu điểm: Mạch thực hiện tốc độ đóng cắt nhanh, có bảo vệ dòng ngược, tránh được hiện tượng ngắn mạch cầu H. Tín hiệu điều khiển đơn giản, có thể có biên độ từ 5V.
- Nhược điểm: Mạch tương đối phức tạp, yêu cầu kiến thức về lập trình Arduino. Điện áp rơi trên transistor công suất làm tốn năng lượng, không phù hợp cho việc điều khiển tốc độ với động cơ công suất lớn.
3. Mạch đảo chiều quay và điều khiển tốc độ dùng L298
Mạch dưới đây sử dụng vi điều khiển Arduino UNO R3 để điều khiển chiều quay và tốc độ của 2 động cơ DC thông qua module L298.
Một module L298 có thể điều khiển cùng lúc tối đa 2 động cơ độc lập hoàn toàn.

Sơ đồ mạch điều khiển tốc độ và đảo chiều dùng L298
Sơ đồ đấu dây:
- Module sử dụng nguồn 12V để cấp điện cho module và nguồn công suất cho động cơ.
- Sử dụng hai chân 6, 7 của Arduino đọc tín hiệu công tắc để thực hiện đảo chiều 2 động cơ tương ứng.
- Hai chân A0, A1 đọc giá trị điện áp từ hai biến trở qua đó thay đổi tốc độ của từng động cơ.
- Chân 9, 10 xuất xung tín hiệu PWM điều khiển tốc độ động cơ 1.
- Chân 11, 12 xuất xung tín hiệu PWM điều khiển động cơ 2.
- Động cơ 1 kết nối với chân OUT1, OUT2 và động cơ 2 kết nối với chân OUT3, OUT4.
Xem thêm : TRIAC: Khái niệm, phân loại và ứng dụng
Ưu và nhược điểm:
- Ưu điểm: Module tích hợp nên việc đấu dây đơn giản, điều khiển được 2 động cơ cả đảo chiều và điều khiển tốc độ.
- Nhược điểm: Mạch cầu H có công suất nhỏ, điện áp dưới 3V, dòng điện nhỏ hơn 5A. Đòi hỏi biết kiến thức về lập trình Arduino.

4. Mạch cầu H sử dụng 4 mosfet kênh N
Đặc điểm của mạch dùng 4 mosfet kênh N là khi thay đổi độ rộng xung PWM từ 0 – 50%, tốc độ động cơ giảm từ tốc độ tối đa về 0. Khi độ rộng xung PWM tăng từ 50-100%, điện áp trung bình trên động cơ đổi dấu nên động cơ quay chiều ngược lại. Và tốc độ tăng từ 0 đến tốc độ lớn nhất.

Sơ đồ mạch đảo chiều động cơ DC dùng mạch cầu H
Mạch gồm 3 phần là phần điều khiển, mạch lái và mạch công suất.
- Mạch điều khiển sử dụng xung PWM từ vi điều khiển hoặc IC phát xung như IC555. Xung PWM sau đó qua 2 opto cách ly PC817 trước khi đưa vào mạch lái.
- Nếu mắc opto cực âm LED nối với GND, opto 2 cực âm LED mắc với xung PWM, ở đầu bên kia opto ta nhận được 22 xung PWM ngược 180 độ. Do đó, ta chỉ cần một xung PWM để điều khiển cả mạch.
- Mạch lái sử dụng IC lái IR2103, IC này đảm bảo điện áp điều khiển ở cực G của Mosfet sẽ ổn định, đảm bảo cho Mosfet dẫn bão hòa, do đó điện áp rơi trên mosfet thấp, hiệu suất của mạch cao.
- Mạch công suất sử dụng 4 mosfet kênh N, điện áp của mạch lái không phụ thuộc mạch công suất. Nên ta có thể sử dụng điện áp cao ở mạch công suất để điều khiển các động cơ điện áp cao.
Xem thêm : TRIAC: Khái niệm, phân loại và ứng dụng
Ưu và nhược điểm:
- Ưu điểm: Mạch điều khiển được động cơ công suất lớn, các mosfet dẫn như một công tắc đóng nên tổn hao ít. Mạch điều khiển được cách ly tốt với mạch công suất. Xung PWM có thể từ IC, mạch phát xung hay vi điều khiển nên có thể không cần lập trình.
- Nhược điểm: Mạch điện phức tạp, cần thiết kế nguồn riêng cho mạch điều khiển, mạch lái và mạch công suất để đảm bảo cách ly tốt.
Như vậy, chúng ta đã tìm hiểu về 4 mạch đảo chiều động cơ DC và điểm qua ưu và nhược điểm của từng mạch. Tùy thuộc vào yêu cầu và điều kiện cụ thể, bạn có thể lựa chọn một trong những mạch này để điều khiển động cơ DC của bạn.
Nguồn: https://cite.edu.vn
Danh mục: Học tập